C++ Library of Motion Planning Libraries
C++ Implementations of common motion planning algorithms including Dijkstras, A*, Hybrid A*, RRT and RRT*.

I graduated with a MS in mechanical engineering (with a focus on control systems) from UC Berkeley in May 2021. I obtained my BS in mechanical engineering from MIT in May 2019. I currently live in Washington DC as Machine Learning Software Engineer in the field of autonomous driving. My current work lies at the intersection between traditional motion planning and deep learning.
Below, you will find information about my course projects, personal projects, internships, and more.
 Machine Learning Software Engineer (Feb 2022 - Mar 2023)
Machine Learning Software Engineer (Feb 2022 - Mar 2023)
 Autonomous Driving Software Engineer (Jun 2021 - Dec 2021)
Autonomous Driving Software Engineer (Jun 2021 - Dec 2021)
 Software Engineering Intern (2019)
Software Engineering Intern (2019)
 Controls Engineering Intern (2018)
Controls Engineering Intern (2018)
 Robotics Engineering Intern (2017)
Robotics Engineering Intern (2017)
 Undergrad Research Assistant (2016)
Undergrad Research Assistant (2016)
 Duluth High School (GA)
Duluth High School (GA) Gainesville High School (GA)
Gainesville High School (GA)
C++ Implementations of common motion planning algorithms including Dijkstras, A*, Hybrid A*, RRT and RRT*.
A C++ header-only library to generate Reeds Shepp Curves for a simple kinematic car that has a fixed turning radius and can move forward and backwards.
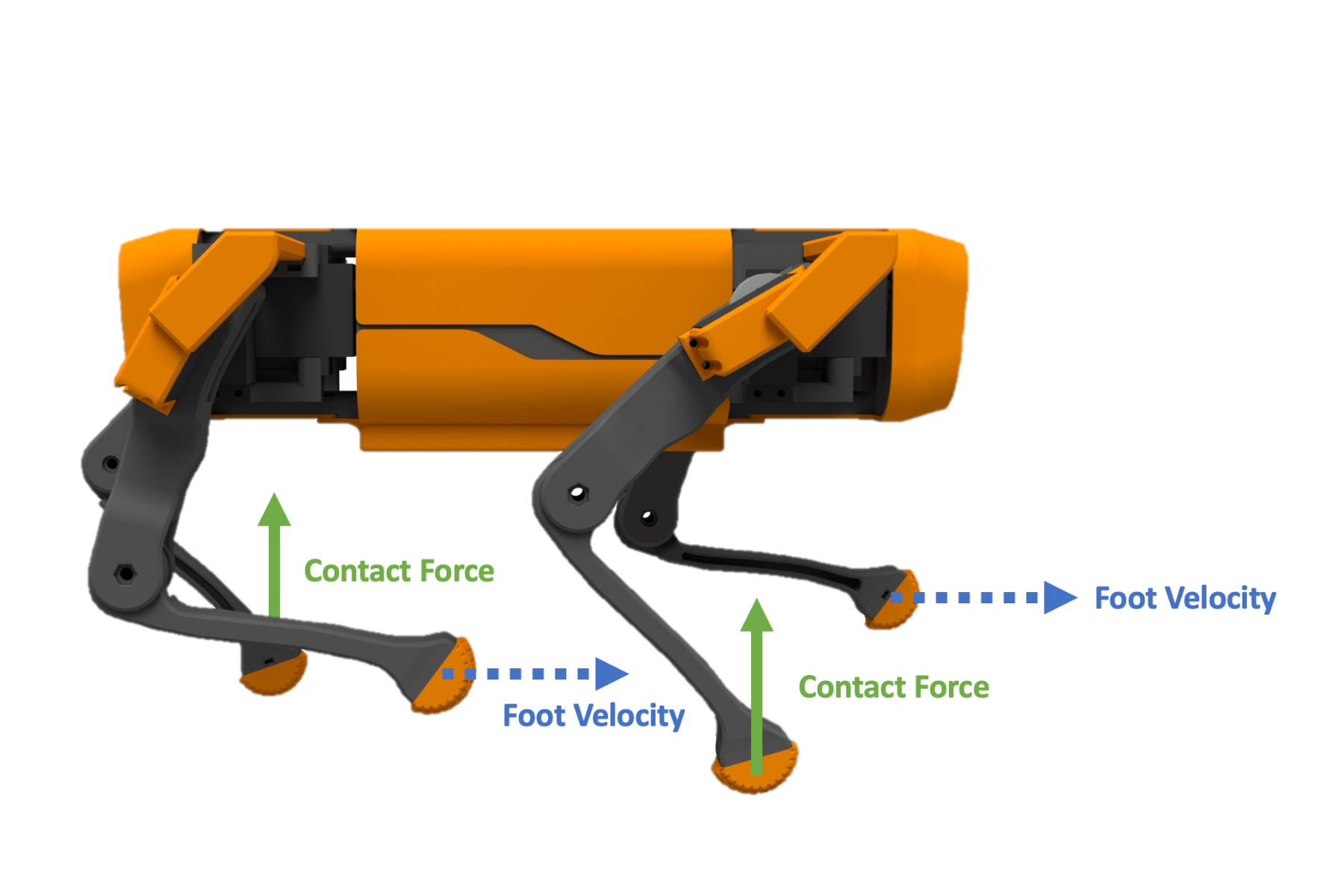
MS Capstone: Realizing different quadrupedal gaits with periodic reward composition and deep reinforcement learning

MIT 6.141: Robotic Science and Systems Capstone Course
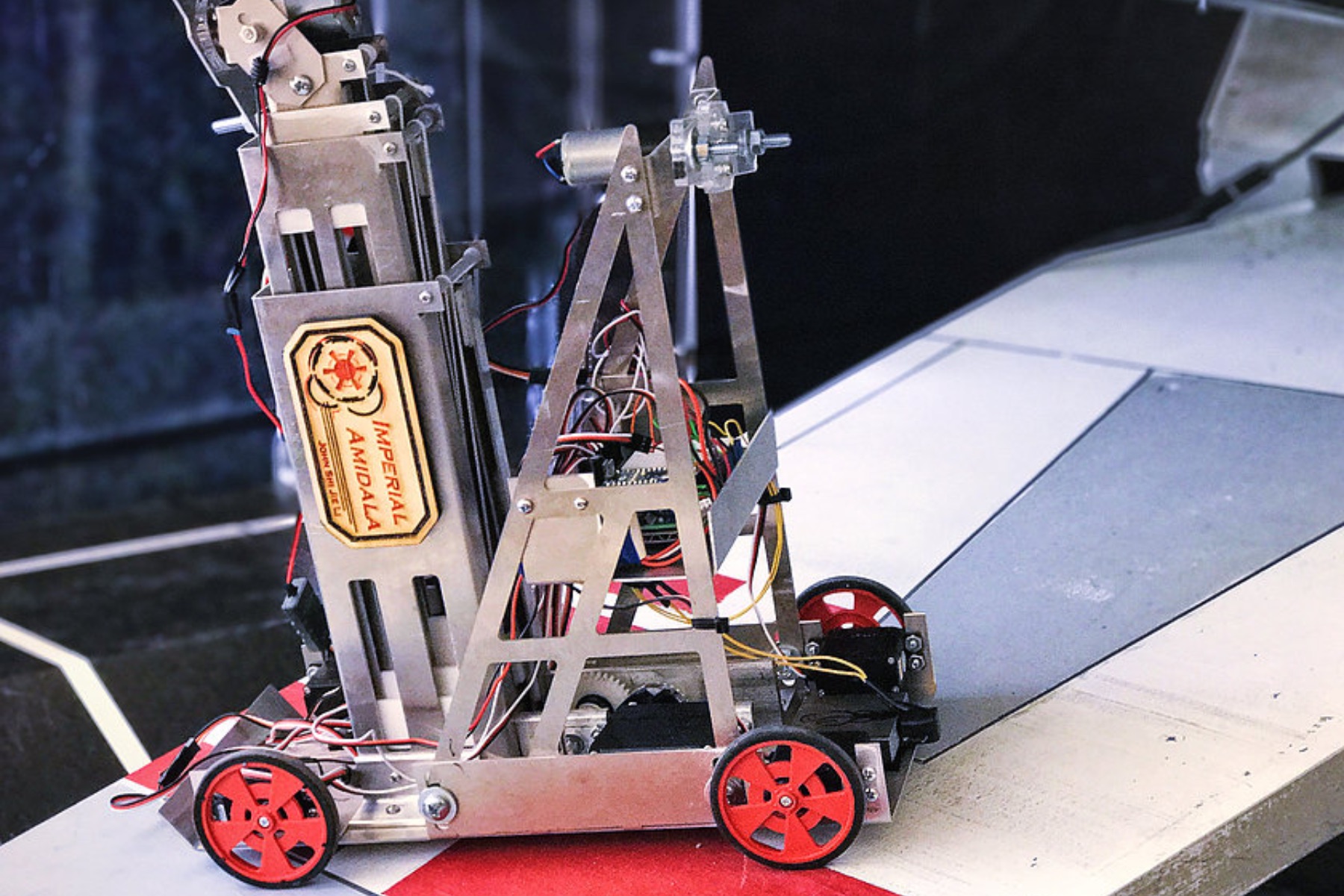
MIT 2.007: Design and Manufacturing I

MIT 2.008: Design and Manufacturing II

MIT CSAIL UROP Summer 2016

Brain Power: Winter Externship
Interested in connecting? Send me a message here or send me an e-mail at johnsjli [at] berkeley [dot] edu.